Run VINS-Mono and save its result as a .tum output for evo analysis
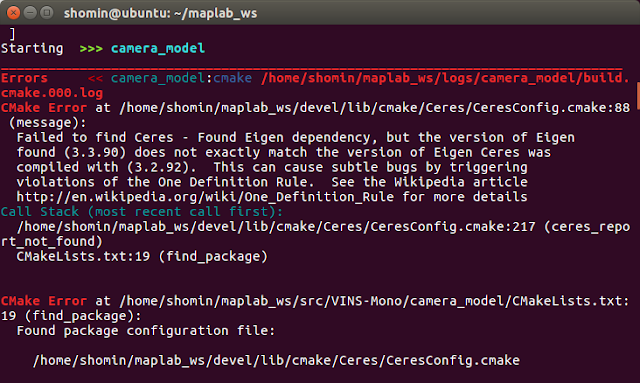
1. Install prerequisites [1] *Solution for the eigen installation problem: reinstall eigen $ git clone https://gitlab.com/libeigen/eigen.git ... ... $ sudo make install *check current eigen version: $ pkg-config --modversion eigen3 (3.2.2 or later strongly recommended, 3.1.0 or later required.) 2. Build VINS-Mono on ROS *Remember to recompile Ceres with the same Eigen version as you plan to use in the VINS-mono project. In my case, since the Ceres was compiled once in the maplab project with different Eigen version, a problem with the Eigen version confliction was reported as following picture. Solution: assign the desired Eigen path and recompile maplab ( $ catkin build maplab) After solving the problem mentioned above, you should be good to go... cd ~/catkin_ws/src git clone https://github.com/HKUST-Aerial-Robotics/VINS-Mono.git cd ../ catkin_make source ~/catkin_ws/devel/setup.bash 3. Run VINS-Mono using EuRoC dataset $ roslaunch vi...
